|
Сегодня: |
||||||||
|
Выбор и использование персональных навигаторов GPS |
||||||||
| | Главная | | Описания | | Статьи | | Программы | | Загрузка | | Ссылки | | Разное | ||
|
Сегодня: |
||||||||
|
Выбор и использование персональных навигаторов GPS |
||||||||
| | Главная | | Описания | | Статьи | | Программы | | Загрузка | | Ссылки | | Разное | ||
|
Магнитный компас и система GPS История появления компаса На протяжении более тысячи лет магнитный компас указывал направление движения для большинства путешественников. В настоящее время компас является одним из старейших навигационных приборов и все еще широко используется капитанами кораблей, пилотами, бойскаутами и туристами. Но благодаря современной микроэлектронной технологии, компас получил новые области применения. Электронные компаса используются как самостоятельные устройства, компоненты к многоэлементным навигационным системам и в качестве встроенных модулей GPS приемников. Многие легковые и грузовые машины по всему миру оснащаются электронными компасами. Несмотря на то, что GPS приемники в комплекте с одной антенной обладают высокой точностью определения своего местоположения, они не в состоянии определить свой курс – направление движения самого приемника или платформы, на которой он установлен. На помощь в данной ситуации приходит компас! Когда GSP сигналы блокируются всевозможными физическими препятствиями, навигационная система с поддержкой GPS может указать направление для дальнейшего движения на основании данных, полученных от компаса. Людям всегда необходимо было путешествовать по миру – находить еду, исследовать и завоевывать новые земли, торговать. Для того, чтобы добраться до требуемого пункта и вернуться назад в безопасности, требовалось умелое применение знаний для определения текущего местоположения и направления, в котором нужно двигаться. Раньше штурманы руководствовались ориентирами на местности, звездами или положением Солнца в полдень, но на незнакомой территории и при сильной облачности достаточно проблематично было определить, в каком направлении необходимо двигаться. Считается, что китайцы первыми разрешили эту проблему. Магнитные свойства магнетита (намагниченного камня) были известны китайцам более чем два тысячелетия назад. Они производили ложки из магнетита, которые свободно поворачиваясь, указывали на юг – на “императорское” направление. Первое письменное упоминание о применении китайцами магнетита в качестве магнитного компаса появилось примерно в 1000 году до н. э. Скорее всего, арабские торговцы привезли компас на запад, где он впервые упоминается в 1187 году в писаниях английского монаха Александра Некэма. Первые европейские компасы использовались итальянскими моряками, перевозившими крестоносцев в Левант. С тех пор компас стал главным навигационным прибором для путешествий по морю, земле или воздуху. Данная статья представляет собой небольшое учебное пособие по электронным магнитным устройствам, по способам измерения магнитного поля Земли и возможностям этих устройств по дополнению конструкции GPS приемника. В основном компас оставался технологически неизменным на протяжении тысяч лет, но появление электроники привело к появлению новых способов определения направлений с использованием магнитного поля Земли. Но перед тем, как мы поговорим о некоторых из этих приборов, давайте кратко рассмотрим такие понятия как магнетизм, магнитное поле Земли и то, как работает традиционный компас.
Магнетизм Магнетизм является составляющей понятия такой основной силы, как электромагнетизм. В 1873 году шотландский физик Джеймс Кларк Максвелл опубликовал теорию, объясняющую практически все электрические и магнитные явления. Данная теория описывает, как переменная электрическая сила, вызванная движением электрических частиц (электрический ток), может создать магнитную силу (так происходит, например, в электромоторе), а переменная магнитная сила вызывает электрическую силу (принцип работы генератора). Электрическая и магнитная силы, действующие на движущуюся заряженную частицу, обычно изменяются со временем и в пространстве. Вместо того, чтобы уточнять, как именно эти силы видоизменяются от места к месту, мы можем использовать вспомогательные величины, независящие от заряда и скорости частицы. Таким образом, мы сможем описать потенциальные электрические и магнитные возмущения, даже при отсутствии заряда. Эти величины представляют собой электрическое поле (E) и магнитное поле (B). Поле – это просто физическая величина, которая принимает различные значения в различных точках пространства. Магнитное и электрическое поля – это векторные поля, потому что они характеризуется и величиной, и направлением. Поле может быть представлено семейством линий поля. В любой точке пространства касательная к линии поля – это направление магнитного поля в данной точке, а расстояние между линиями поля – это его числовая характеристика. Чем ближе друг к другу расположены линии, тем напряженнее поле. В средней школе большинство из нас видели такое поле, когда исследовали магнитное поле стержневого электромагнита с помощью железных опилок. Электрические приборы, минералы, содержащие железо, даже человеческое тело создают магнитные поля. Но на все эти поля накладывается поле самой Земли.
Геомагнитное поле Магнитное поле Земли, называемое еще геомагнитным полем, в основном возникает из электропроводящей внешней оболочки ядра. Более 90 процентов геомагнитного поля формируется именно там. Эта часть поля называется основным полем. На основное поле накладываются дополнительные поля, создаваемые намагниченными горными породами в коре Земли; поля, возникающие вне Земли из-за электрического тока в ионосфере и магнитосфере, появляющегося из-за движения ионов и электронов; электрические токи, проходящие в коре Земли (обычно создаваемые различными внешними магнитными полями); и воздействия океанских течений. Величины этих дополнительных геомагнитных полей изменяются во времени и пространстве. Например, поля, созданные течениями в ионизированных верхних слоях атмосферы и в магнитосфере, могут достигать 10 процентов от величины основного поля. Шкала времени изменений во всем магнитном поле меняется от долей секунды (микропульсации, вызванные свойствами магнитосферы и солнечного ветра) до миллионов лет (шкала времени для полной перемены основного поля). Основное магнитное поле Земли обладает высокой степенью симметрии. В действительности, оно сходно с полем, которое существовало бы, если бы в центре Земли находился огромный стержневой электромагнит. Данное поле (называемое дипольным полем) имеет ось симметрии параллельную такому магниту и пересекает поверхность Земли в Арктике в северном геомагнитном полюсе и в Антарктиде в южном геомагнитном полюсе. Линии магнитного поля исходят из южного полушария и вновь входят в Землю в северном полушарии таким образом, что северный геомагнитный полюс в действительности является южным полюсом дипольного поля. Дипольная ось не параллельна оси вращения Земли, а отклоняется от него на 10 градусов, поэтому геомагнитные и географические полюса не совпадают. Северный геомагнитный полюс сейчас находится рядом с островом Эллесмир на территории Канадского арктического архипелага, а южный геомагнитный полюс расположен на расстоянии примерно 1000 километров к югу от Австралии. Я говорю "сейчас", потому что полюса медленно дрейфуют в результате происходящих перемен в основном магнитном поле Земли. Фактически основное поле структурно намного сложнее дипольного поля. Следовательно, линии основного поля не расположены перпендикулярно на геомагнитных или дипольных полюсах. Линии поля вертикальны в местах, известных как магнитные полюса или наклонные магнитные полюса. Они смещены на сотни километров от геомагнитных полюсов. В
любой точке пространства вектор
геомагнитного поля
Угол между горизонтальной составляющей вектора геомагнитного поля B и географическим направлением на север называется магнитным направлением или магнитным склонением (D). Угол между B и горизонтальной плоскостью называется магнитным уклоном или магнитным наклоном (I). Величины D и I измеряются в градусах, положительным значением для D считается направление на восток, а положительным для I - направление вниз. Величина или напряжение всего поля (иногда обозначаемое как F) может быть разделено на горизонтальную (H) и вертикальную (Z) составляющие, как показано на рис. 1. В свою очередь горизонтальная компонента может быть разбита на северную (X) и восточную (Y) составляющие. Эти составляющие измеряются в эрстедах Oe, но традиционно представляются в нанотеслах (нT) (1 Oe = 105 нT). Напряжение магнитного поля Земли примерно составляет от 25000 до 65000 нТ (0.25-0.65 Oe). (См. таблицу 1 с величинами напряженности других магнитных полей).
Таблица 1. Сравнительные величины напряженности различных магнитных полей.
Модели магнитного поля Земли Основное магнитное поле Земли может быть математически смоделировано. В настоящее время основными моделями являются Международное Геометрическое Базовое Поле (МГБП) и Мировое Магнитное Поле (ММП). МГБП рассчитано группой исследователей из Международной Ассоциации Геомагнетизма и Аэрономии. МГБП моделирует поле и его изменение на протяжении 100 лет, используя ряд сферических гармонических коэффициентов (они называются коэффициентами Гаусса в честь немецкого ученого Карла Фридриха Гаусса, разработавшего данный метод для изучения геомагнетизма) при усеченном разложении в ряд геомагнитной функции потенциала и ее производной по времени. Магнитное поле является градиентом этого потенциала. Данные коэффициенты вычисляются, основываясь на множестве измерений магнитного поля в различных точках по всему миру и по наблюдениям со спутника. Параметры МГПБ обновляются каждые пять лет, текущая модель известна как “МГПБ 2000”. Значения магнитного поля до 2000 года могут быть вычислены через линейную интерполяцию с использованием значений от предыдущих моделей или их обновлений. С 2000 года до 2005 значения вычисляются, используя коэффициенты периода 2000 года и их вековые изменения. Коэффициенты ММП с 2000 по 2005 год были выпущены совместно Британской Геологической Разведкой и Геологической Разведкой США в сотрудничестве с Британским Гидрографическим Управлением и Национальным Картографическим Агентством США. Математическая модель ММП аналогична используемой в МГБП.
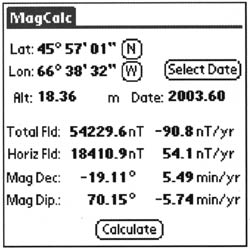
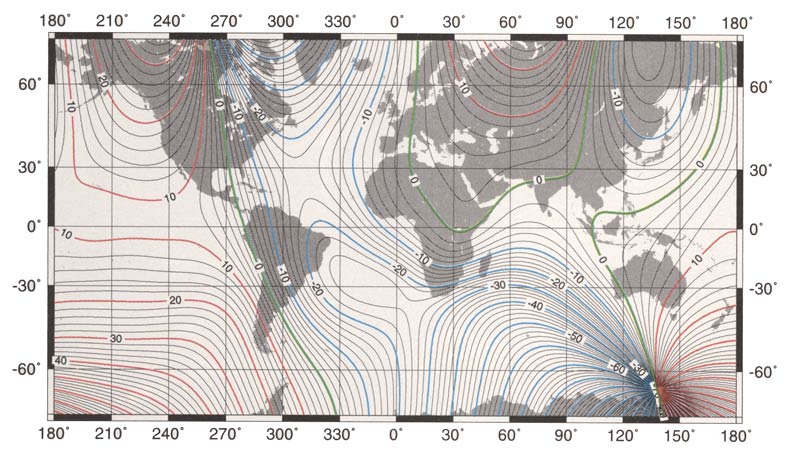
На рис. 2 показан результат применения прибора с данными ММП, работающего в автономном цифровом режиме. Если рассчитать склонение для всего земного шара, то можно построить карту с нанесенными контурами магнитных склонений (изогонами), образец которой представлен на рис. 3.
Данные модели магнитных полей учитывают только длинноволновые пространственные колебания, создающиеся в земном ядре. Они не используют средне и коротковолновые колебания, создающиеся в земной мантии и коре. Следовательно, могут существовать ошибки в склонениях и уклонах на несколько градусов в различных местах на поверхности Земли (в основном над сушей, по краям континентов, над горами и крупными котлованами). В действительности, в некоторых местах из-за геологических образований, ошибки в склонениях и уклонах могут достигать и даже превышать 50 градусов! Однако на поверхности океана среднеквадратическая ошибка отклонения от модели (в рамках соответствующего промежутка времени) составляют примерно 0.5 градусов. В программное обеспечение большинства GPS приемников встроены параметры МГБП или ММП для перевода истинных направлений и пеленгов в магнитные. Точность перевода зависит от внутренних ошибок моделей и от того, используются ли они в тот период, на который они рассчитаны. В конце концов, данные моделей устаревают и ошибки увеличиваются до тех пор, пока в приемник не будут внесены новые параметры, включающие в себя данные обновленной модели или введенные самим пользователем поправки.
Традиционный компас
Электронные компасы В настоящее время во многих системах электронные приборы заменяют устаревающую технологию намагниченной иглы, показания которой часто ошибочны из-за внешних факторов, таких как: вибрация, наклон, ускорение, а также внешние магнитные поля, которые мы уже упоминали. К тому же традиционный компас сложно приспособить к цифровому считыванию или компьютерному интерфейсу, и, следовательно, его сложно внедрить в навигационную систему. Большинство электронных компасов основано на датчиках, называемых магнитометрами. Магнитометр – это прибор для измерения интенсивности одного или нескольких составляющих магнитного поля Земли. Данный прибор, как и традиционный компас, является аналоговым прибором, линейно или не линейно реагируя на изменения в магнитном поле, в котором он находится. Его импульсы могут быть преобразованы для возможности их ввода в микропроцессор. Сначала магнитометры и схожая с ними электроника были очень громоздкими, но благодаря прогрессу в технологии полупроводников, они настолько уменьшились в размерах, что теперь некоторые из них даже встраиваются в интегральные схемы. Типовой электронный компас создается при помощи установки двух магнитометров под правильными углами на плоской горизонтальной опоре. Каждый датчик измеряет одину из компонент горизонтального поля - по оси x опоры и по оси y. Если мы запишем эти компоненты как Bx и By, то угол между осью x и направлением горизонтального поля (указывающим на северный магнитный полюс) будет равен:
Определение требуемого направления. Направление – это горизонтальный угол между прямой, соединяющей одну точку с другой, и начальным направлением (обычно на север), измеряемый по часовой стрелке от 0 до 360 градусов. Начальное направление может быть направлением на северный географический или магнитный полюс, направлением на север по координатной сетке на карте, а может быть и просто произвольно выбранным направлением. Под географическим направлением понимается угол, отсчитанный от направления на северный географический полюс. Направление по компасу – это угол, отсчитанный от направления на северный магнитный полюс, определенное традиционным компасом при имеющемся отклонении. Если в направлении по компасу внести поправку за магнитное склонение, мы получим магнитное направление. Магнитное и географическое направления различаются из-за склонения, и если оно известно, то одно можно получать из другого. Направление также может отчитываться от координатной системы, используемой на картах или схемах. Направление по координатной сетке отсчитывается от направления вертикальных линий сетки (для карт, где север находится "сверху"). В настоящее время в качестве системы координат для карт широко используется универсальная поперечно цилиндрическая проекция Меркатора (УПЦПМ). В данной проекции направление на север по координатной сетке совпадает с направлением на северный географический полюс, расположенный в центре каждой шестиградусной зоны УПЦПМ. Его направление меняется по каждую сторону от центрального меридиана, потому что прямоугольная сетка не отражает сходимость меридиан у полюсов. На картах часто указываются взаимосвязь между направлениями на северный географический и магнитный полюса, что позволяет осуществлять перевод одного типа в другой. Большинство GPS приемников могут показывать направление, отсчитанное от географического, магнитного направления на северный полюс или от направления по координатной сетке, используя сохраненную информацию о склонении, сохраненные значения параметров сетки и начала отсчета. Иногда направления даются в интервалах от 0 до 90 или от 0 до 180 градусов. В этом случае должен быть указан соответствующий сегмент или румб. Например, направление C40°З означает 40 градусов на запад от севера, что эквивалентно 320 градусам. Направление может быть также выражаться в милах, как часто используется военными США. Мил основан на радианах. Однако окружность содержит примерно 6.283 миллирадиан, что является довольно неудобным числом, и мил обычно принимается за величину, равную 1/6400 круга. Направление может быть также измерено в градах (очень распространено в Европе). Град равен 1/100 прямого угла или, по-другому, окружность состоит из 400 град. Часто применяется термин азимут как синоним слова направление. Однако, некоторые опытные навигаторы предпочитают использовать термин азимут для описания местоположения астрономического объекта на небесной сфере, а слово направление - для земных объектов. Горизонтальное направление, в котором двигается какое либо физическое тело (или предполагаемое направление), выраженное угловой величиной, измеряемой по направлению стрелки, начиная с севера, называется курсом. Другими словами – это направление или азимут прямой линии, вдоль которой передвигается тело. В морском флоте это означает направление движения по поверхности воды вне зависимости от течения. Направление относительно земли называется путевым углом. Однако термины курс и путевой угол (путь) обычно являются взаимозаменяемыми особенно в воздушной и наземной навигации. Курс может быть географическим, магнитным, по компасу или по сетке в зависимости от выбора начального направления. В навигации термины курс и маршрут используются при задании либо фактического, либо желательного пути. Для удаления данной неоднозначности термины курс пройден хорошо и маршрут пройден хорошо используются для описания направления от предыдущего местоположения до настоящего фактического местоположения. Еще раз подчеркнем, что эти термины часто могут быть взаимозаменяемыми, при этом игнорируются движение воздуха или воды, по которым передвигается судно. Третий термин - курс по земле, тоже иногда используется для описания текущего направления движения какого-либо тела. Отметим, что эти термины не обязательно совпадают с понятием направления, в котором тело находится в данный момент. Из-за ветров или течений платформа может находиться под углом к желаемому маршруту.
Типы датчиков магнитного поля. Несколько различных типов магнитометров работают по различным принципам. Я кратко опишу четыре самых распространенных типа: магнитометры, изготовленные по технологии “fluxgate”, датчик на основе эффекта Холла, магнитоиндуктивный датчик и магниторезистивный датчик.
Технология “Fluxgate” Изделия, изготовленные по технологии “Fluxgate” – это, по существу, трансформаторы с ядром из сплава, магнитные кристаллы которого легко ориентируются в линию (например, никель-железный сплав пермаллой). Если ток в ведущем проводе (называемом обмотка подмагничивания или ведущая обмотка) изменяется, то ток в добавочной обмотке (сенсорной обмотке) будет изменяться в соответствии с окружающим магнитным полем. Основным принципом измерения такого поля является сравнение тока в ведущей обмотке, необходимым для насыщения ядра в одном направлении с током, необходимым для насыщения в противоположном направлении. Различие определяется окружающим полем. Ядро такого рода устройств может быть в виде стержня или тороидального сердечника. В случае использования стержня ведущая и сенсорная обмотки наматываются рядом или поверх друг друга, и датчик реагирует на поле, расположенное вдоль стержня. Можно также использовать тороидальный сердечник. Это позволит измерить две ортогональные составляющие поля (двойную ось), намотав две сенсорные обмотки вокруг внешней стороны сердечника под прямым углом друг к другу. Виктор Ваквиер изобрел такой магнитометр в 1930-х годах во время работы в Gulf Research Laboratories. Его инновационный прибор привел к применению магнитометров в ряде прикладных задач, включая геофизические поисково-разведочные работы по добыче полезных ископаемых и углеводородов, обнаружение субмарин, а также мониторинг и составление карт магнитного поля Земли с помощью датчиков, расположенных на земле, самолетах и спутниках. Для создания компаса необходим двухосевой датчик “fluxgate”. Одна сенсорная обмотка определяет составляющую поля Земли вдоль одной оси (назовем ее осью x), а другая определяет составляющую вдоль оси y. Угол между направлением на северный магнитный полюс и осью x равен арктангенсу от деления значения y на значение x (см. уравнение 1). Очевидно, что датчик “fluxgate” должен находиться в горизонтальном положении для точного определении направления. Любое колебание датчика, которое может произойти на плывущем судне, значительно уменьшает его точность. Для предотвращения потери точности, наклоны датчика должны компенсироваться, например, с помощью карданных шарниров, таким образом, чтобы он всегда оставался в горизонтальном положении. И зафиксированные и закрепленные с помощью карданных шарниров датчики “fluxgate” в настоящее время находятся в свободной продаже, также как и полностью сформированные модули компасов. Некоторые модели имеют соответствующий промышленным стандартам Национальной Ассоциации Морской Электроники выход для вывода цифровых данных. Нечувствительный к колебаниям компас можно создать из трехосевого датчика “fluxgate”, совмещенного с электронным креномером. У такого компаса нет движущихся частей, и он известен как виброустойчивый компас.
Датчик, основанный на эффекте Холла В 1879 Эдвин Холл, будучи студентом университета им. Джона Хопкинса, установил, что если ток проходит по тонкому проводу, находящемуся в магнитном поле, поперек проводника появляется небольшое напряжение. Данное явление было не более чем простой научной диковинкой только до тех пор, пока развитие полупроводников не позволило создать интегральные схемы эффекта Холла с транзисторами для усиления слабого сигнала напряжения. Интегральные схемы также включали схемы для уменьшения отклонения сигнала из-за изменения температуры, напряжения в сети и других факторов. В настоящее время имеются несколько электронных приборов, основанных на эффекте Холла, включая различные типы переключателей и линейные датчики. Когда переключатель на основе эффекта Холла подвергается действию магнитного поля с правильной полярностью, которая превышает порог его работы, включается выходной транзистор, позволяя току проходить через него. Когда напряжение поля понижается до порога, транзистор выключается. Простой электронный компас, который сможет определять направления на основной или четвертной румб, можно создать, установив по кругу четыре переключателя на основе эффекта Холла вокруг маленькой свободно вращающейся намагниченной иголки. Когда иголка указывает на один из переключателей, его транзистор включается, позволяя проходить току и включать установленный над ним светодиод, который показывает направление или курс. Если иголка остановилась посередине между двумя переключателями, то включаются оба светодиода. Это указывает направление на четвертной румб. Для более точных компасов требуются линейные датчики на основе эффекта Холла с выходным напряжением, которое бы точно соответствовало изменениям в окружающем магнитном поле. В состоянии покоя (при отсутствии магнитного поля), выходной сигнал в идеале должен равняться половине сетевого напряжения, деленное на рабочее напряжение и разницу температур прибора. При возрастании магнитного поля южного полюса напряжение на выходе возрастет по сравнению с состоянием покоя. И наоборот, при возрастании магнитного поля северного полюса напряжение на выходе понизится по сравнению с состоянием покоя. Пара датчиков, перпендикулярно расположенных на горизонтальной плоскости, может с точностью до нескольких градусов определить направление, которое указывает намагниченная иголка. Магнитоиндуктивный датчик Магнитоиндуктивный магнитометр измеряет магнитное поле по его влиянию на индуктивность катушки проволоки или соленоида. Катушка используется в качестве индуктивного элемента в индукторе/резисторе генератора разрывных колебаний (релаксационном генераторе). По мере изменения окружающего поля изменяется и индуктивность катушки. Это в свою очередь изменяет частоту генератора, которая может быть измерена по силе компонента поля, параллельного оси катушки. Магнитоиндуктивные датчики появились сравнительно недавно, первый патент на них был выдан в 1989 году. Также как и в других видах магнитных датчиков, для определения направления в горизонтальной плоскости, а следовательно и направления на северный магнитный полюс, необходимо закрепить два таких датчика перпендикулярно друг другу на горизонтальной плоскости. Двухосевой датчик можно закрепить с помощью карданного шарнира для поддержания его в горизонтальном положении, а трехосевой датчик можно использовать совместно с креномером. В настоящее время многие автомобильные компасы производятся на основе магнитоиндуктивных датчиков. Магниторезистивный датчик Анизотропные магниторезистивные (АМР) датчики представляют собой специальные резисторы, сделанные из тонкой пермаллоевой пленки, помещенной на кремниевую пластину. При их производстве, пленка помещается в сильное магнитное поле для ориентации магнитных областей в одинаковом направлении, определяя тем самым направление вектора намагничивания. Затем, при попадании во внешнее магнитное поле, перпендикулярное пленке, вектор намагничивания начинает вращаться или изменять угол. Это, в свою очередь, меняет сопротивление пленки. Если включить АМР прибор в электрическую схему, такую как мост Уитстона, то изменение сопротивления можно обнаружить по изменению в напряжении, а потом высчитать силу воздействующего магнитного поля. В 1856 году Вилльям Томпсон и Лорд Кельвин впервые описали магниторезистивный эффект. Магниторезистивные датчики с одной, двумя или тремя осями могут быть очень миниатюрными по размеру. Например, датчик с тремя осями можно произвести с площадью основания 2.8 мм на 8.1 мм и высотой в 4.0 мм. Такие транзисторные аломощные датчики могут выпускаться либо отдельно, либо встроенными в другие изделия. При правильной калибровке электронные компасы на магниторезистивных датчиках могут достигать точности, превышающей один градус. Встроенные компасы в некоторых GPS приемниках основаны именно на данной технологии. Калибровка компасов Компас реагирует на векторную сумму магнитного поля Земли и всех накладывающихся на него полей. В зависимости от силы последних значительно понижается точность компаса. Индуцированный магнетизм в железистых сплавах, таких как железо или сталь ("мягкое железо"), находящихся вблизи компаса, влияет на окружающее магнитное поле, также как и объекты, обладающие остаточным магнетизмом ("твердое железо"). Даже автомобильные динамики и статический разряд от нейлоновой одежды могут повлиять на точность показаний компаса. Следовательно, то направление, которое указывает компас, называется север компаса, и в общем случае оно отличается от направления на северный магнитный полюс. Эта разница в градусах называется девиацией магнитного компаса. Если действие накладывающегося поля постоянно, то компас можно откорректировать или калибровать так, чтобы он учитывал влияние этого поля. Традиционный компас, зафиксированный на какой-либо платформе (например, на корабле), можно настроить так, чтобы он компенсировал магнитное отклонение. Для этого необходимо разместить небольшие магнитики и/или кусочки железистого материала в определенных местах вокруг компаса. Такая настройка компаса может оказаться сложной и долгой. Также компас можно легко калибровать, просто отмечая ошибки компаса по ряду заранее известных направлений. Такой метод называется “колебанием компаса”. Электронные компасы тоже необходимо калибровать для исправления отклонений и других возможных ошибок, таких как масштабный коэффициент и ошибки при несовпадении осей. Хотя метод “колебания компаса” также представляется возможным использовать при калибровке электронных компасов, но здесь есть несколько основных недостатков. Во-первых, для данного метода требуется заранее знать точные направления, что может быть не всегда легко доступно. Во-вторых, отклонение частично зависит и от силы локального геомагнитного поля. Если калибровка производится на одном месте, она может оказаться неприемлемой на другом. В-третьих, данный метод не подходит, если электронный компас состоит из трех ортогональных датчиков. Исследователями из Стэнфордского университета был разработан альтернативный метод, который не зависит от направления опоры компаса и местоположения объекта. Метод калибровки основывается на том, что все точки, в которых измерения безошибочны, при двух перпендикулярно закрепленных датчиках, образуют круг. Таким образом, при вращении модуля с датчиками по кругу, выходной сигнал обоих датчиков должен представлять собой синусоидальную волну одинаковой величины, причем фаза одного выходного сигнала должна отличаться от фазы другого на 90 градусов. Если BH – это величина горизонтальной составляющей геомагнитного поля, Bx и By ,– горизонтальные составляющие в системе отсчета, связанной с носителем компаса, например, автомобилем, а Y – направление машины, то
Это уравнение окружности с центром в начале условной системы координат опоры. Радиус окружности равен горизонтальному компоненту локального геомагнитного поля. Обычно его можно вычислить с помощью одной из моделей глобального поля. Влияние отклонений и других ошибок будет видоизменять круг, меняя его форму и/или местоположение его центра. Воздействие элементов “твердого железа” добавляет константу к величине поля вдоль каждой оси выходного сигнала датчиков, что приводит к смещению центра окружности, в то время как влияние “мягкого железа” и масштабные ошибки датчиков превращают окружность в эллипс. В конечном счете получается эллипс со смещенным центром, представленный уравнением:
где Bx и By – это выходные сигналы датчиков, dBx и dBy – это смещения геомагнитного поля, вызванные влиянием “твердого железа”, а sx и sy – это масштабные коэффициенты для учета ошибок масштабирования датчиков и влияния “мягкого железа”. Считается, что ошибка выравнивания датчиков не существует (датчики ортогональны и расположены в горизонтальной плоскости). Если такая ошибка имеет место, то эллипс будет вращаться таким образом, чтобы его оси не будут параллельны привязанным к корпусу осям x и y. В уравнении 3 содержатся четыре неизвестных величины. Эти величины могут быть вычислены с помощью нелинейного математического метода, используя измерения, полученные при вращении модуля с датчиками в горизонтальной плоскости. Нет необходимости вращать модуль на все 360 градусов, но чем больше сегмент испытания эллипса, тем меньше влияние измерительных помех. На практике, в зависимости от чувствительности модуля может потребоваться один или два полных поворота для правильной калибровки компаса. После одного вычисления значения параметров могут быть сохранены в памяти и использованы для поправки последующих измерений компаса. Обычно данный или какой-либо другой метод калибровки включается в контроллер микропроцессора коммерческих компасных модулей, также как и в GPS приемниках со встроенным компасом. Для конкретного прибора рекомендуется проводить калибровку вдалеке от металлических объектов. В этом случае необходимо будет учитывать только масштабирование и магнитное влияние самого корпуса. Калибровка может быть применена и для систем трех ортогональных друг другу датчиков. В таком случае вычисляются параметры эллипсоида, а модуль с датчиками должен вращаться и в горизонтальной, и в вертикальной плоскостях. Некоторые электронные компасы имеют функцию самокалибровки. Внутри прибора создается маленькое магнитное поле и оно изменяется под управлением процессора. Реакция на изменение поля используется для калибровки компаса.
Электронные компасы в GPS приемниках GPS приемник может определить точные данные о своем местоположении и скорости, а по вектору скорости он может определить направление своего движения, называемое курсом или маршрутом. Точность, с которой приемник определяет свое направление, зависит от значения его скорости, причем при скоростях, превышающих 10 км в час, ошибка обычно бывает меньше одного градуса! GPS приемник в комплекте с одной антенной не способен определить направление движения. Однако компас может предоставить такую информацию, и, как уже упоминалось ранее, некоторые GPS приемники конструктивно комплектуются электронными компасами (обычно с двухосевым датчиком). Некоторые приемники оснащены трехосевыми датчиками, что позволяет получать достаточно точные направления даже в случае небольшого наклона. Как уже говорилось выше, встроенное в GPS приемник программное обеспечение содержит параметры модели основного геомагнитного поля Земли, в независимости от того содержит ли сам приемник электронный компас, с помощью которого он может рассчитать величину отклонения от своей текущей позиции. Таким образом, приемник может вычислять как географический (истинный) так и магнитный курс движения. Компас GPS приемника позволяет применять навигационный приём, известный под названием “увидел и пошел”. На экране приемника показывается круг компаса с указателем. Держа приемник горизонтально на уровне глаз, пользователь выстраивает в линию две отметки на корпусе приемника, а указатель выравнивает на отдаленный объект и дает инструкцию приемнику "зафиксировать" выбранное направление. Затем приемник непрерывно обновляет информацию о направлении на объект по мере того, как пользователь двигается произвольным путем до объекта. Обычно модуль компаса в GPS приемнике отключают для сбережения энергии. Приемник также можно настроить на то, чтобы при достижении им определенной скорости (например, 5 или 10 км в час) его дисплей переключался бы с функции направления по компасу на функцию направления, вычисленного самим GPS приемником. Можно установить опции так, чтобы приемник возвращался к направлению компаса тогда, когда скорость держится ниже определенного порога на заранее заданное количество секунд. Одночастотный GPS приемник также должен иметь какие-либо сведения о геомагнитном поле для вычисления оценки задержки GPS сигналов при прохождении ими ионосферы. Для так называемой модели передачи сигнала требуется знание геомагнитной широты точки пересечения вектора удаления GPS спутника и слоя, содержащего электроны ионосферы. Геомагнитная широта рассчитывается с достаточной точностью по формуле
где fi и li – это геомагнитные широта и долгота точки пересечения с ионосферой. Это преобразование основывается на данных о дипольном поле, на эпоху середины 1900-х. Заключение В то время как миллионы GPS приемников используются по всему миру, почтенный компас все еще остается важнейшим навигационным прибором. Вне зависимости от того применяется простой игольный или электронный компас, встроенный в приемник, пользователи GPS всегда смогут определить свое местоположение и при движении, и в стационарном положении.
Благодарности Рисунок 3 был предоставлен Геологической Разведкой США по геомагнитной программе, он, а также много другой информации по геомагнетизму доступно на веб-сайте этой организации .
Автор: Richard B. Langley
Источник:
23.08.2004 |

 Так
как же работает традиционный компас? Компас
– это просто намагниченная иголка,
вращающаяся на стержне, обеспечивающим их
малое трение, который позволяет ей свободно
вращаться в своей плоскости. При
использовании компаса игла принимает такое
положение, что её плоскость становится
параллельна линиям магнитного поля,
расположенным в непосредственной близости
от нее. Если установить иголку таким
образом, что она сможет беспрепятственно
вращаться в горизонтальной и вертикальной
плоскостях, то направление, в котором
указывает иголка, будет показывать и
склонение, и уклон локального
геомагнитного поля. Для того чтобы иголка
оставалась в горизонтальном положении (так
она будет точно указывать направление на
северный магнитный полюс), её обычно
уравновешивают специально под особенности
магнитного поля того региона, в котором
компас будет эксплуатироваться. Некоторые
производители балансируют компасы под один
из пяти существующих регионов Земли, однако
модели со специальным глобальным
балансированием могут использоваться по
всему миру. Обычно игольный компас
заполняется жидкостью (смесь воды с
алкоголем или очищенным маслом) для
возможности приостановления движение
иголки и предотвращения ее колебания при
движении с компасом.
Так
как же работает традиционный компас? Компас
– это просто намагниченная иголка,
вращающаяся на стержне, обеспечивающим их
малое трение, который позволяет ей свободно
вращаться в своей плоскости. При
использовании компаса игла принимает такое
положение, что её плоскость становится
параллельна линиям магнитного поля,
расположенным в непосредственной близости
от нее. Если установить иголку таким
образом, что она сможет беспрепятственно
вращаться в горизонтальной и вертикальной
плоскостях, то направление, в котором
указывает иголка, будет показывать и
склонение, и уклон локального
геомагнитного поля. Для того чтобы иголка
оставалась в горизонтальном положении (так
она будет точно указывать направление на
северный магнитный полюс), её обычно
уравновешивают специально под особенности
магнитного поля того региона, в котором
компас будет эксплуатироваться. Некоторые
производители балансируют компасы под один
из пяти существующих регионов Земли, однако
модели со специальным глобальным
балансированием могут использоваться по
всему миру. Обычно игольный компас
заполняется жидкостью (смесь воды с
алкоголем или очищенным маслом) для
возможности приостановления движение
иголки и предотвращения ее колебания при
движении с компасом.